NASA, 외계 생명체 찾는 수영 로봇 개발

미래의 언젠가 휴대전화 크기의 로봇 떼가 목성의 위성 유로파나 토성의 위성 엔셀라두스의 수 킬로미터 두께의 얼음 지각 아래 물 속을 헤엄쳐 외계 생명체를 찾을 수 있을 것입니다. 이 로봇은 얼어붙은 지각을 통과하여 작은 수중 로봇을 방출할 수 있는 단단한 얼음 해동 센서 내부에 포장될 수 있으며, 이 로봇은 새로운 세계에 대해 배우기 위해 멀리 그리고 깊은 곳으로 헤엄칠 수 있습니다.
또는 적어도 그것은 남가주에 있는 NASA 제트 추진 연구소(JPL)의 로봇 공학 엔지니어인 Ethan Schaller의 비전입니다. Schaler의 SWIM(Sensing With Micro-Swimmers) 개념은 최근 NASA NIAC(Innovative Advanced Concepts) 프로그램의 2단계 자금 지원으로 600,000달러를 받았습니다. Schaller와 그의 팀은 자금을 사용하여 향후 2년 동안 3D 인쇄 프로토타입을 만들고 테스트할 것입니다.
초기 단계의 SWIM 개념은 각각 길이가 약 12cm이고 부피가 60~75cc인 쐐기 모양의 로봇을 상상합니다. 직경 25cm의 크라이오봇(얼음 관통 탐침)에 약 40개 정도 들어갈 수 있고, 과학 탑재체 부피의 15%만 차지할 수 있도록 설계됐다. 이것은 정적 해양 측정을 통해 데이터를 수집할 수 있는 더 강력하지만 덜 이동하는 과학 장비를 위한 더 많은 여지를 남길 것입니다.
각 로봇에는 자체 추진 시스템, 온보드 컴퓨터 및 초음파 통신 시스템과 함께 온도, 염도, 산도 및 압력 센서가 있습니다. 연구의 두 번째 단계에서는 바이오마커를 모니터링하기 위한 화학 센서도 추가할 예정입니다.
2024년에 발사될 예정인 NASA의 유로파 클리퍼(Europa Clipper) 임무는 2030년에 목성의 위성에 도착할 때 다양한 기기를 사용하여 상세한 데이터를 수집하기 위해 목성의 위성에 여러 번 비행할 것입니다. Cryobot 개념은 과학 탐사 표면을 통해 이러한 해양 세계를 조사하기 위해 개발되고 있습니다. NASA의. 유로파 프로그램(SESAME) 접근 메커니즘과 다른 NASA 기술 개발 프로그램을 통해.
수영 로봇을 배치하는 크라이오봇은 연결 로프를 통해 수상 착륙선과 연결된다. 표면 탐사선은 차례로 지상의 임무 컨트롤러와 접촉하는 지점이 될 것입니다. 이 묶인 접근 방식은 냉동 로봇이 얼음이 바다와 만나는 지점을 훨씬 넘어서는 모험을 할 수 없다는 것을 의미합니다.
“바다에 도착하는 데 오랜 시간이 걸렸지만 잘못된 장소에서 얼음 지각을 발견했다면 어떻게 될까요? 거기에 생명체의 흔적이 있지만 바다에 들어간 곳이 아니라면 어떨까요? 로봇 떼를 데려와서 JPL의 SWIM 팀 과학자인 Samuel Hoyle은 보도 자료에서 “우리는 단일 로봇이 허용하는 것보다 훨씬 더 많은 환경을 탐색하기 위한 연구가 “존재”할 수 있을 것이라고 말했습니다.
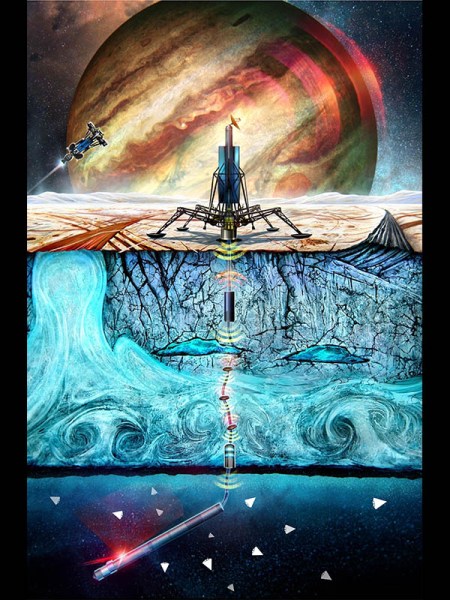 수영 로봇을 배치하는 크라이오봇은 연결 로프를 통해 수상 착륙선과 연결된다. (그림 크레디트: NASA/JPL)
수영 로봇을 배치하는 크라이오봇은 연결 로프를 통해 수상 착륙선과 연결된다. (그림 크레디트: NASA/JPL)
Howell은 수영 로봇을 화성 표면에서 로버의 지속적인 동반자인 NASA의 Mars Innovation 헬리콥터에 비유합니다. 헬리콥터는 로버의 도달 범위를 확장하고 로버가 환경을 탐색하는 방법을 이해하는 데 도움이 되는 이미지를 다시 보냅니다. 이 경우 여러 수영 봇은 데이터를 다시 보내기 위해 크라이오봇 주변 영역을 탐색하는 여러 헬리콥터로 생각할 수 있습니다.
또한 크라이오봇에는 핵 배터리가 포함되어 있어 얼음을 통해 아래로 내려가는 경로를 녹일 수 있습니다. 이 열이 바다에 도달하면 열 거품을 만들어 그 위의 얼음을 천천히 녹이고 물의 화학 반응을 일으킬 수 있는 반응을 일으킬 수 있습니다. SWIM은 이와 별도로 데이터를 수집할 수 있습니다.
또한, SWIM 로봇은 물고기와 새를 모방하여 함께 “풀링”하고 중복 측정을 수행하여 데이터의 오류를 줄일 수 있습니다. 이 그룹 데이터는 온도 또는 염도와 같은 기울기도 표시할 수 있습니다. 예를 들어, 무리 집단 센서를 사용하여 온도 또는 염도 변화의 원인을 찾고 추가 탐사를 위해 해당 방향을 가리킬 수 있습니다.
Schaller는 보도 자료에서 “에너지 구배 또는 화학적 구배가 있는 경우 이것이 생명이 시작되는 방식입니다. 우리는 이를 감지하기 위해 로봇에서 상류로 이동해야 할 것입니다.”라고 말했습니다.

차영 노(Chaeyoung Noh)는 Ulsanfocus.com의 필진으로서 뉴스, 정치, 경제, 기술, 스포츠, 연예, 라이프스타일 등 다양한 분야의 소식을 독자들에게 전하고 있습니다. 정확하고 이해하기 쉬운 보도를 바탕으로 주요 현안과 지역·국내외 이슈를 폭넓게 다루며, 독자들에게 도움이 되는 정보와 시의성 있는 이야기를 전달하는 데 집중합니다. 균형 잡힌 시각과 명확한 설명을 통해 독자들이 중요한 뉴스를 쉽게 이해할 수 있도록 노력하고 있습니다.